Системы рентгенотелевидения (РТС). Критерии выбора
раздел: СтатьиThe article is devoted to criteria of selection of a radioscopic system from a customer.s point of view. The majority of the systems. characteristics and their correlation with the quality of the component parts are described. Exhaustive recommendations for the selection of the necessary radioscopic system, and concise ones for a high-voltage generator and an x-ray tube are given. The article includes types of image enhancement systems and their basic parameters. A purchaser can also find rough price ranges for radioscopic systems.
Применение рентгенотелевизионных систем (РТС) экономически оправдано по сравнению с рентгенорадиографией благодаря отказу от дорогостоящей рентгеновской пленки и значительному уменьшению времени контроля. На отечественном рынке представлено довольно большое количество систем рентгенотелевидения различных производителей. Подчас очень тяжело сделать выбор, так как все системы очень близки по рекламируемым характеристикам. При этом часто производитель рекламирует параметры, которые у него получились лучше всего. Зачастую эти параметры совершенно не важны для конкретной задачи, или наоборот, параметр, который действительно является важным, всячески скрывается или вместо него приводятся другие, косвенно из него вытекающие, но не имеющие с ним прямой связи.
Однако каждая РТС обладает рядом параметров, по которым можно сделать однозначный вывод о качестве конкретной системы. Я попытаюсь дать краткий обзор всех параметров с анализом влияния каждого параметра на качество получаемого изображения.
В данной статье не ставится целью дать обзор существующим РТС, мало того, в ней даже не будут упоминаться какие-либо конкретные системы, а предпринимается попытка описать все параметры, необходимые для того, чтобы потребитель сам мог определиться и сделать самостоятельный выбор.
Существует несколько основных типов РТС, отличающихся принципом действия преобразующе-усиливающих звеньев тракта. В стандартную РТС входят источник рентгеновского излучения, рентгено-оптическое преобразующее устройство и система визуализации. Внимание будет сконцентрировано на двух составляющих частях системы: рентгено-оптическом преобразующем устройстве и системе визуализации изображения.
При этом будем считать, что источник рентгеновского излучения у заказчика уже существует. Если нет, то загляните в раздел «Экстравольт» на сайте www.testron.ru.
Итак, начнем с рентгено-оптического преобразователя. Основная задача этого устройства - преобразовать входное рентгеновское излучение в оптическое изображение, которое затем будет зафиксировано приемной камерой и преобразовано в электрический сигнал, поступающий на систему визуализации изображения. Подобные преобразователи могут быть построены на нескольких принципах. Рассмотрим их преимущества и недостатки.
Тип 1. Рентгено-оптические преобразователи на основе сцинтилляционного кристалла или флуоресцентного экрана.
 Обычно преобразователи устроены следующим образом. На входе располагается сцинтиллятор, преобразующий рентгеновское излучение в видимый свет. С его обратной стороны высокочувствительной камерой считывается оптическое изображение. В качестве камеры может применяться либо стандартный изокон (РТС «Интроскоп»), либо суперортикон, совмещенный с электронно-оптическим усилителем света (РТС «РИ-60 ТЭ»), либо высокочувствительная ССDкамера (РТС «УРИ-10ПЗС»). Недостатки преобразователей этого типа довольно очевидны. Из-за низкого коэффициента преобразования рентгеновского излучения в свет требуется увеличивать дозу излучения на входе преобразователя. Приходится уменьшать расстояние от трубки до кристалла и сильно повышать мощность, т. е. увеличивать анодный ток трубки. Использование рентгеновских трубок высокой мощности, которые имеют соответственно большой размер фокусного пятна, приводит к ухудшению пространственного разрешения системы: чем больше фокусное пятно, тем ниже разрешение. К сожалению, эту проблему невозможно понять из рекламных проспектов, так как при определении разрешения эталон устанавливается непосредственно на входной экран, и размер фокусного пятна трубки не оказывает отрицательного воздействия на получаемый результат. В реальных же условиях деталь находится на некотором расстоянии от преобразователя, и увеличение фокусного пятна резко ухудшает параметры системы. Кроме того, подобные системы обладают довольно низким контрастом. Это связано с тем, что приходится применять высокочувствительную камеру, которая обладает низким отношением «сигнал-шум». Чувствительность контроля по ГОСТ 7512-82 составляет, например, 3 - 4 % для РТС «Интроскоп» и «РИ-60ТЭ» при толщине контролируемой стали до 20 и 45 мм соответственно. Немаловажен и тот факт, что повышение мощности рентгеновского аппарата приводит к ухудшению радиационной обстановки на рабочем месте и, следовательно, к увеличению затрат на защиту от излучения, а также к уменьшению срока службы рентгеновской трубки. К достоинствам подобных преобразователей следует отнести возможность их применения в случае высокоэнергетичного излучения (десятки мегавольт) за счет увеличения толщины сцинтиллятора, в частности, при использовании бетатронов при просвечивании стали толщиной порядка 100 мм. Такие преобразователи способны довольно длительное время выдерживать высокие радиационные нагрузки без перекрытия деталью или защитными шторками.
Обычно преобразователи устроены следующим образом. На входе располагается сцинтиллятор, преобразующий рентгеновское излучение в видимый свет. С его обратной стороны высокочувствительной камерой считывается оптическое изображение. В качестве камеры может применяться либо стандартный изокон (РТС «Интроскоп»), либо суперортикон, совмещенный с электронно-оптическим усилителем света (РТС «РИ-60 ТЭ»), либо высокочувствительная ССDкамера (РТС «УРИ-10ПЗС»). Недостатки преобразователей этого типа довольно очевидны. Из-за низкого коэффициента преобразования рентгеновского излучения в свет требуется увеличивать дозу излучения на входе преобразователя. Приходится уменьшать расстояние от трубки до кристалла и сильно повышать мощность, т. е. увеличивать анодный ток трубки. Использование рентгеновских трубок высокой мощности, которые имеют соответственно большой размер фокусного пятна, приводит к ухудшению пространственного разрешения системы: чем больше фокусное пятно, тем ниже разрешение. К сожалению, эту проблему невозможно понять из рекламных проспектов, так как при определении разрешения эталон устанавливается непосредственно на входной экран, и размер фокусного пятна трубки не оказывает отрицательного воздействия на получаемый результат. В реальных же условиях деталь находится на некотором расстоянии от преобразователя, и увеличение фокусного пятна резко ухудшает параметры системы. Кроме того, подобные системы обладают довольно низким контрастом. Это связано с тем, что приходится применять высокочувствительную камеру, которая обладает низким отношением «сигнал-шум». Чувствительность контроля по ГОСТ 7512-82 составляет, например, 3 - 4 % для РТС «Интроскоп» и «РИ-60ТЭ» при толщине контролируемой стали до 20 и 45 мм соответственно. Немаловажен и тот факт, что повышение мощности рентгеновского аппарата приводит к ухудшению радиационной обстановки на рабочем месте и, следовательно, к увеличению затрат на защиту от излучения, а также к уменьшению срока службы рентгеновской трубки. К достоинствам подобных преобразователей следует отнести возможность их применения в случае высокоэнергетичного излучения (десятки мегавольт) за счет увеличения толщины сцинтиллятора, в частности, при использовании бетатронов при просвечивании стали толщиной порядка 100 мм. Такие преобразователи способны довольно длительное время выдерживать высокие радиационные нагрузки без перекрытия деталью или защитными шторками.
Тип 2. Преобразователь на основе вакуумного усилителя яркости рентгеновского изображения - так называемый РЭОП.
 В этом устройстве входной экран преобразователя является элементом вакуумной системы, использующей метод электростатического переноса электронов с помощью высоковольтных ускоряющих электродов на выходной люминесцентный экран. Формирование изображения происходит уже на выходном экране небольшого размера - приблизительно 25 мм. За счет электростатического усиления изображение на выходном экране очень интенсивное, даже при крайне малом анодном токе. В частности, многие подобные преобразователи начинают работать уже с 6 кВ при анодном токе всего 0,5 мА. Высокая освещенность и малый размер выходного экрана позволяют использовать зеркало для отвода изображения под 90° при практически полном отсутствии искажений и, благодаря этому, вывести ССDматрицу приемной камеры из прямого пучка рентгеновского излучения и улучшить шумовые характеристики. Кроме того, высокая освещенность выходного экрана позволяет использовать приемную ССDкамеру низкой чувствительности с очень высоким отношением «сигнал-шум». В результате повышается контрастная чувствительность и разрешение системы. Чувствительность контроля по ГОСТ 7512-82 у подобных систем составляет 0,7 - 2 % при толщине контролируемой стали до 102 мм. Системы с РЭОП имеют режимы электронно-оптического увеличения, задаваемого переключением значений высокого напряжения на электродах РЭОП. При этом на выходное окно фокусируется изображение только с части входного окна и, таким образом, поднимается разрешение системы. Эти особенности обеспечивают высокое качество изображения, что снижает утомляемость оператора. К недостаткам подобных систем следует отнести их чувствительность к сотрясениям и ударам, что затрудняет их применение в мобильных РТС.
В этом устройстве входной экран преобразователя является элементом вакуумной системы, использующей метод электростатического переноса электронов с помощью высоковольтных ускоряющих электродов на выходной люминесцентный экран. Формирование изображения происходит уже на выходном экране небольшого размера - приблизительно 25 мм. За счет электростатического усиления изображение на выходном экране очень интенсивное, даже при крайне малом анодном токе. В частности, многие подобные преобразователи начинают работать уже с 6 кВ при анодном токе всего 0,5 мА. Высокая освещенность и малый размер выходного экрана позволяют использовать зеркало для отвода изображения под 90° при практически полном отсутствии искажений и, благодаря этому, вывести ССDматрицу приемной камеры из прямого пучка рентгеновского излучения и улучшить шумовые характеристики. Кроме того, высокая освещенность выходного экрана позволяет использовать приемную ССDкамеру низкой чувствительности с очень высоким отношением «сигнал-шум». В результате повышается контрастная чувствительность и разрешение системы. Чувствительность контроля по ГОСТ 7512-82 у подобных систем составляет 0,7 - 2 % при толщине контролируемой стали до 102 мм. Системы с РЭОП имеют режимы электронно-оптического увеличения, задаваемого переключением значений высокого напряжения на электродах РЭОП. При этом на выходное окно фокусируется изображение только с части входного окна и, таким образом, поднимается разрешение системы. Эти особенности обеспечивают высокое качество изображения, что снижает утомляемость оператора. К недостаткам подобных систем следует отнести их чувствительность к сотрясениям и ударам, что затрудняет их применение в мобильных РТС.
Тип 3. Твердотельный преобразователь на основе аморфного кремния
 Твердотельные преобразователи обладают более высоким разрешением и динамическим диапазоном по сравнению с РЭОП. Кроме того, они невелики по размерам и могут использоваться в мобильных РТС. К сожалению, на сегодняшний день стоимость твердотельных преобразователей заметно превышает стоимость РЭОПов. Кроме того следует отметить тот факт что многие твердотельные преобразователи (особенно большого размера) имеют параметр контрастной чувствительности около 2-2.5% что уступает РЭОПам, которые имеют это показатель на уровне 1-1.25%.
Твердотельные преобразователи обладают более высоким разрешением и динамическим диапазоном по сравнению с РЭОП. Кроме того, они невелики по размерам и могут использоваться в мобильных РТС. К сожалению, на сегодняшний день стоимость твердотельных преобразователей заметно превышает стоимость РЭОПов. Кроме того следует отметить тот факт что многие твердотельные преобразователи (особенно большого размера) имеют параметр контрастной чувствительности около 2-2.5% что уступает РЭОПам, которые имеют это показатель на уровне 1-1.25%.
Самыми оптимальными по цене и качеству сейчас являются недорогие преобразователи ФИЛИН 1010Л (100х100мм), ФИЛИН 2010Л (200х100мм) и ФИЛИН 2020Л (200х200мм) с параметром контрастной чувствительности около 1%. На данный момент они являются реальной альтернативой небольшим 6-ти и 9-ти дюймовым РЭОПам.
Однако в настоящее время в промышленности наиболее востребованы системы на основе РЭОП, поэтому в дальнейшем мы будем рассматривать характеристики подобных систем.
Итак, первый параметр систем с РЭОП - это тип РЭОП.
В настоящее время на отечественном рынке присутствуют исключительно импортные РЭОП фирм SIEMENS и THALES. Они приблизительно одинаковы по параметрам, однако, фирма THALES предлагает специальные РЭОП с невыгорающим выходным окном. В отличие от обычных, они способны более продолжительное время выдерживать прямое неэкранированное излучение. Поэтому, я бы рекомендовал использовать системы с РЭОП фирмы THOMSON.
Cледует обратить внимание, что многие фирмы для уменьшения себестоимости РТС используют более дешевые медицинские РЭОП. Эти РЭОП обладают чуть более высокой чувствительностью, что позволяет компенсировать дешевую камеру и невысокое качество оптики, установленных в системе. К сожалению, медицинские РЭОП не рассчитаны на длительное воздействие излучения и гораздо быстрее выходят из строя.
Перейдем к следующему параметру - геометрическому разрешению системы.
Этот параметр определяется несколькими составляющими. Прежде всего - разрешением РЭОП. Большинство фирм указывает разрешение РЭОП и где-нибудь в маленькой сноске пишут, что оно измерено микроскопом на выходном окне. Этот параметр, конечно, интересен с научной точки зрения, но не имеет никакого отношения к реальному разрешению РТС, так как это значение довольно высоко и никогда не получается после передачи изображения через оптический канал и приемную камеру. Оконечное разрешение системы зависит от качества и светосилы оптики, типа применяемой приемной камеры и типа системы визуализации изображения. Выходное разрешение РЭОП обычно составляют 4.5 – 8.0 пар линий/мм. Дальше идет оптика. Чтобы сохранить это разрешение при довольно низких аберрациях на краях изображения, требуется применение оптики, имеющей светосилу не хуже 2,8. В дешевых системах очень часто применяется оптика со светосилой 3,5 - 4,5 (дешевле в 2 - 3 раза), что приводит к потере качества изображения.
После оптики стоит приемная камера. Сейчас наиболее используемыми являются CCDкамеры, которые пришли на замену устаревшим видиконам. От числа ячеек изображения (пикселов) камеры зависит оконечное разрешение РТС. Каково бы не было разрешение выходного экрана РЭОП, количество переданных точек изображения ограничено числом ячеек приемной камеры. Среднестатистическая аналоговая CCDкамера имеет размер матрицы 758 x 582 ячеек. Чтобы получить теоретическое предельное разрешение системы в парах линий/мм, размер входного экрана необходимо разделить на удвоенное число ячеек камеры (чтобы получить количество пар линий, а не просто линий). На самом деле разрешение будет еще ниже, потому что геометрическое разрешение CCDкамеры не может быть равно числу ячеек, оно всегда немного хуже - на 10-15%. Давайте проведем простой подсчет. Если входное окно имеет размер 215 мм (стандартный размер для РЭОП диаметром 9”), то при использовании стандартной камеры мы получаем параметры теоретически предельного геометрического разрешения - по горизонтали (785 ячеек/215 мм)/2 = 1,83 пар линий/мм, а по вертикали . (582/215 мм)/2 = 1,35 пар линий/мм. Печально - но факт. Конечно, приведенный подсчет примитивен. В реальности все гораздо сложнее, но цифр лучше Вы все равно не получите. Теперь посмотрите на рекламные проспекты - интересно, не правда ли?
Некоторые фирмы используют в своих системах более дорогие цифровые камеры, имеющие 1024 x 1024 точек изображения и более. В этом случае цифры более приятные - например, предельное геометрическое разрешение 9” РЭОП в этом случае будет составлять 2,4 пар линий/мм как по горизонтали, так и по вертикали, что уже намного лучше.
Параметр третий - тип используемой камеры.
Стоимость CCDкамеры колеблется от сотен долларов до десятков тысяч, и в хороших системах она составляет солидную часть себестоимости системы. Соответственно возникает желание поставить камеру дешевле. Как же отличить хорошую камеру от плохой, ведь в конечном итоге именно камера определяет конечные параметры системы. Проще всего выяснить у производителя оборудования физический размер CCDматрицы камеры. Чем он больше, тем лучше (при одинаковом количестве пикселов камеры). Дешевые камеры имеют размер матрицы 1/4 или 1/3 дюйма (такие применяются в любительских видеокамерах). Более высокое качество имеют камеры с размером матрицы 1/2 дюйма. Вообще конечно более правильно говорить не о размере CD матрицы, а о размере ее пикселов. Но эту информацию производители обычно не знают.
В РТС допустимо применять CCDкамеры с размером матрицы 1/2 дюйма и более для матриц с количеством пикселов около 750х580 пикселов и 2/3 дюйма и более для матриц с количеством пикселов около 1000х1000 пикселов. Чем больше размер ССD матрицы, тем меньше ее тепловой и рентгеновский шумы за счет большей величины пикселов. А уровень сигнала от каждого пиксела наоборот намного выше. Отношение «сигнал-шум» у матриц большего размера намного лучше, а именно оно в конечном итоге влияет и на разрешение, и на контрастную чувствительность системы.
Некоторые камеры имеют встроенную систему аппаратного усиления краевой резкости, что приводит к заметному улучшению качества изображения. Самые лучшие системы используют цифровые камеры высокого разрешения с размерами матрицы 1 дюйм и более. В этом случае следует обратить внимание на тип выходного сигнала. Ряд фирм, даже при использовании цифровых камер, передают информацию обыкновенным видеосигналом. Стандарт видеосигнала разрабатывался давно и не был рассчитан на использование цифровых видеокамер. Таким образом, даже если камера имеет разрешение 1024 x 1024 и более, при передаче изображения через видеосигнал качество оконечного изображения будет заметно хуже, чем при полностью цифровой передаче. Системы с полностью цифровой передачей имеют цифровой переходной кабель от камеры к компьютеру, и перепутать его с видеокабелем довольно сложно.
Небольшое дополнение для тех, кто планирует использовать систему для контроля изделий в реальном времени (т. е. без остановки изделия перед входным окном РЭОП). Приобретайте только те системы, в которых установлена камера прогрессивного сканирования, так как она обеспечивает минимальное искажение изображения по сравнению с камерами со стандартной черезстрочной разверткой. При использовании черезстрочной развертки изображение состоит из двух полукадров, при этом в одном из них передаются четные строки изображения, а в другом - нечетные, и если в процессе передачи этих полукадров исследуемая деталь сдвигается, качество изображения резко падает. Камеры прогрессивного сканирования передают изображение построчно, и данная проблема у них отсутствует.
Параметр четвертый - наличие системы поворота камеры.
Эта система позволяет поворачивать приемную камеру в процессе работы так, чтобы исследуемое изображение располагалось оптимальным образом по отношению к ячейкам камеры и направлению телевизионной развертки. Это сильно помогает при выявлении тонких трещин, так как если эта трещина попадет между строками матрицы или между разверткой изображения, то ее будет очень плохо видно, либо не видно вообще. Второе достоинство системы поворота камеры заключается в том, что она позволяет увеличить видимый участок изображения. Так как матрица камеры квадратная или прямоугольная, а входной экран РЭОП - круглый, то в случае исследования, например, сварного шва Вы увидите на экране максимально возможный участок шва, если он расположен по диагонали CCDматрицы. Система поворота камеры позволяет Вам это.
Следующий параметр - тип системы визуализации изображения.
Обычный телевизионный монитор будет не самым лучшим выбором, так как изображение на нем довольно заметно мерцает (с частотой 50 Гц), что сильно ухудшает качество восприятия и утомляет оператора. Более грамотным будет выбор телевизионного монитора с разверткой 100 Гц. Однако и его параметры далеки от совершенства. При необходимости получения действительно качественного изображения следует, в дополнение к телевизионному монитору, установить систему улучшения изображения. В РТС с использованием цифровых камер система улучшения изображения является неотъемлемой частью РТС, и использование телемониторов в них невозможно.
Шестой параметр - визуальное разрешение РТС.
Визуальное разрешение не следует путать с геометрическим: оно определяется с помощью специальной миры в виде свинцовой пластинки, на которую нанесены прорези, задающие определенное количество пар линий/мм. Мира закрепляется на входном окне РЭОП, под углом в 45° к линиям развертки монитора и линиям ячеек CCDматрицы. Разрешение, при котором возможно увидеть чередование черных и белых линий, считается реальным визуальным разрешением РТС. Следует обратить особое внимание 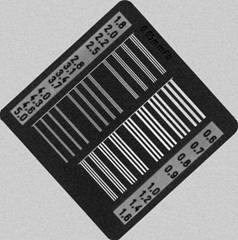 на то, что мира прикрепляется непосредственно к входному окну РЭОП, то есть не используется геометрическое увеличение. Очень многие фирмы приводят параметры разрешения и контрастной чувствительности при каком-либо геометрическом увеличении. То есть когда тест-объект закреплен на некотором расстоянии от РЭОП, и за счет чисто геометрического (например, вдвое) увеличения полоска 0,1 мм проектируется на РЭОП как 0,2 мм, т. е., таким образом, можно повысить разрешение вдвое, втрое и больше. При этом реальный размер видимого изображения на экране уменьшается обратно пропорционально геометрическому увеличению. Не следует путать геометрическое увеличение с электронно-оптическим увеличением РЭОП. Обычно, если РЭОП имеет несколько режимов электронно-оптического увеличения, то приводятся параметры визуального разрешения системы для каждого режима. Как это ни странно, но визуальное разрешение системы может быть выше геометрического. Это происходит отчасти из-за того, что расположение миры под неточным углом в 45° к линиям ячеек CCDматрицы является оптимальным с точки зрения визуального разрешения. Практически исключена возможность попадания штрихов точно между ячейками камеры. Также следует принять во внимание, что человеку свойственно видеть то, чего нет на самом деле, особенно, если он знает, что нужно увидеть. Визуальное разрешение сильно увеличивается при применении фильтра “Sharpen” (“Резкость”) в системе улучшения изображения. С точки зрения дефектоскописта параметр визуального разрешения системы является одним из самых важных, так как именно он определяет видимость дефектов на экране монитора.
на то, что мира прикрепляется непосредственно к входному окну РЭОП, то есть не используется геометрическое увеличение. Очень многие фирмы приводят параметры разрешения и контрастной чувствительности при каком-либо геометрическом увеличении. То есть когда тест-объект закреплен на некотором расстоянии от РЭОП, и за счет чисто геометрического (например, вдвое) увеличения полоска 0,1 мм проектируется на РЭОП как 0,2 мм, т. е., таким образом, можно повысить разрешение вдвое, втрое и больше. При этом реальный размер видимого изображения на экране уменьшается обратно пропорционально геометрическому увеличению. Не следует путать геометрическое увеличение с электронно-оптическим увеличением РЭОП. Обычно, если РЭОП имеет несколько режимов электронно-оптического увеличения, то приводятся параметры визуального разрешения системы для каждого режима. Как это ни странно, но визуальное разрешение системы может быть выше геометрического. Это происходит отчасти из-за того, что расположение миры под неточным углом в 45° к линиям ячеек CCDматрицы является оптимальным с точки зрения визуального разрешения. Практически исключена возможность попадания штрихов точно между ячейками камеры. Также следует принять во внимание, что человеку свойственно видеть то, чего нет на самом деле, особенно, если он знает, что нужно увидеть. Визуальное разрешение сильно увеличивается при применении фильтра “Sharpen” (“Резкость”) в системе улучшения изображения. С точки зрения дефектоскописта параметр визуального разрешения системы является одним из самых важных, так как именно он определяет видимость дефектов на экране монитора.
И, наконец, самый важный из рассматриваемых параметров - контрастная чувствительность.
Она определяется как отношение толщины проволочки к толщине металла, на котором проводится измерение. То есть, если на металле толщиной 50 мм видна проволочка толщиной 0,5 мм, то контрастная чувствительность равна 0,5/50 x 100 = 1 %. Чем меньше эта величина, тем выше качество системы. В большинстве случаев от РТС требуется получение контрастной чувствительности лучше 2 %. Обычно РТС обеспечивает высокие результаты при контроле средних толщин - от 5 до 70 мм стали. При меньшей толщине чувствительность падает, что объясняется спадом частотно-контрастной чувствительности РЭОП и радиационной нерезкостью, которая становится сравнимой с размерами мелких деталей изображения. В области больших толщин чувствительность также немного ухудшается, так как возрастает рассеяние излучения в толще материала. Чувствительность контроля резко возрастает при наличии системы улучшения изображения, так как осуществляемое интегрирование полностью устраняет пространственно декоррелированные шумы, снижающие контрастную чувствительность. Как и при определении визуального разрешения, следует обратить внимание на отсутствие геометрического увеличения, так как многие фирмы для улучшения характеристик своих систем в области малых толщин приводят кривые чувствительности при геометрическом увеличении в 2-6 раз.
Может возникнуть вопрос, почему самые важные параметры рассматриваются в самом конце?
 Как ни странно, но именно эти параметры являются самыми необъективными. На визуальное разрешение и чувствительность контроля оказывает влияние сложная совокупность взаимосвязанных физических факторов: тип применяемых рентгеновского аппарата и трубки; размер фокусного пятна; коэффициент пульсаций анодного тока; энергия и интенсивность излучения; толщина материала и конфигурация изделия; внешняя освещенность экрана; электромагнитные помехи и т. д. Часто параметры, полученные в идеальных условиях завода-изготовителя и вынесенные в рекламу, совершенно недостижимы в реальных заводских условиях. Помимо всего прочего, при определении визуальных параметров одним из решающих факторов является уровень профессиональной подготовки дефектоскопистов-операторов и отсутствие у них проблем со зрением. Попробуем привести простой пример. Перед вами картинка проволочного эталона чувствительности. Посмотрите, сколько проволочек Вы видите. Ниже приведено изображение после обработки сложным математическим алгоритмом определения чувствительности. Теперь Вы видите, сколько проволочек увидел компьютер.
Как ни странно, но именно эти параметры являются самыми необъективными. На визуальное разрешение и чувствительность контроля оказывает влияние сложная совокупность взаимосвязанных физических факторов: тип применяемых рентгеновского аппарата и трубки; размер фокусного пятна; коэффициент пульсаций анодного тока; энергия и интенсивность излучения; толщина материала и конфигурация изделия; внешняя освещенность экрана; электромагнитные помехи и т. д. Часто параметры, полученные в идеальных условиях завода-изготовителя и вынесенные в рекламу, совершенно недостижимы в реальных заводских условиях. Помимо всего прочего, при определении визуальных параметров одним из решающих факторов является уровень профессиональной подготовки дефектоскопистов-операторов и отсутствие у них проблем со зрением. Попробуем привести простой пример. Перед вами картинка проволочного эталона чувствительности. Посмотрите, сколько проволочек Вы видите. Ниже приведено изображение после обработки сложным математическим алгоритмом определения чувствительности. Теперь Вы видите, сколько проволочек увидел компьютер.
Таким образом, общепринятый метод определения визуальных параметров не может считаться объективным. Однако применение в системе высококачественных комплектующих гарантирует самое высокое качество получаемого изображения и соответственно высокие значения визуального разрешения и чувствительности контроля. Именно поэтому мы сначала обсудили типы РЭОП, камер, оптики, а только потом - параметры системы.
Параметры РТС можно значительно улучшить применением системы улучшения изображения. Основное предназначение этих систем - оцифровка, интегрирование, математическая обработка, визуализация и архивное хранение изображений.
Главным параметром систем улучшения изображения является разрядность оцифровки входного сигнала.
 |
 |
 |
 |
 |
 |
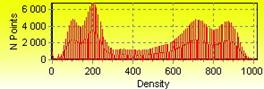
Большинство систем улучшения изображения оцифровывают входной сигнал с разрядностью 8 бит, что составляет 256 градаций серого цвета. Подобные системы морально устарели. Для получения высококачественного изображения необходимо оцифровывать сигнал как минимум 10-битным преобразованием, что составляет 1024 градации серого цвета. Если посмотреть на гистограмму, то можно заметить, что исследуемое изображение лежит в довольно небольшой области. Если исследуемое изображение занимает четверть возможной ширины гистограммы, то при разрядности оцифровки входного сигнала 8 бит внутри исследуемого участка реально находится всего 64 градации серого цвета. Для получения оптимального качества изображения этот участок надо растянуть на всю возможную ширину гистограммы, но тогда мы будем наблюдать довольно большие провалы в гистограмме, а на экране изображение будет сильно зашумленным с резкими переходами от одной градации к другой. С другой стороны, если в этом же режиме используется камера и система оцифровки на 10 бит, то на том же участке будет не 64 градации серого цвета, а 256. При растяжении этого участка на весь динамический диапазон мы получим плавное и качественное изображение. Таким образом, при выборе системы улучшения изображения стремитесь к тому, чтобы оцифровка сигнала была как минимум 10-битной. Очень многие фирмы в рекламных проспектах скрывают истинную разрядность системы, ограничиваясь фразами, что программное обеспечение полностью 16-битное, а разрядность составляет 8/16 бит и т. д. В цифровых камерах система оцифровки находится непосредственно внутри камеры и от системы улучшения изображения требуется только умение работать с изображениями, содержащими более 8-бит информации.
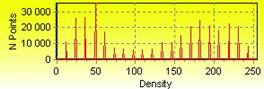
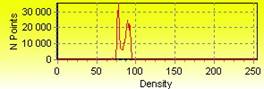
Проще всего определить разрядность системы, посмотрев на гистограмму изображения. Если по горизонтальной оси отложены значения от 0 до 255, то система 8-битная, а если от 0 до 1024 . 10-битная и т. д. Многобитные системы, позволяющие работать практически с любыми разрядностями оцифровки, значения по горизонтальной оси откладывают в процентах %. Это позволяет представлять пользователю унифицированный интерфейс, не зависящий от применяемого оборудования.
Остальные функции в том или ином виде присутствуют в большинстве систем, и я приведу их в произвольном порядке.
Интегрирование
Для уменьшения шума обычно используется интегрирование по 16 или 32 кадрам, однако желательно, чтобы система имела возможность интегрирования до 256 кадров. Если Вы планируете работу с движущимся изображением, я рекомендую Вам выбрать систему, в которой присутствует так называемый рекурсивный интегрирующий фильтр. В отличие от обыкновенных интегрирующих систем, этот фильтр, сохраняя скорость 25 кадров в секунду, показывает Вам интегрированное изображение по Nпоследним кадрам. При работе рекурсивного фильтра изображение движется по экрану плавно, без рывков даже при относительно больших значениях N.
Цифровые фильтры
Современные системы имеет большой набор цифровых фильтров. Реально Вы будете пользоваться всего тремя-четырьмя фильтрами (я не имею в виду, конечно, исследовательские лаборатории). Желательно, чтобы система имела волновой фильтр типа «мексиканская шляпа», фильтры нижних и верхних пространственных частот, фильтр «Sharpen» для усиления резкости и один-два псевдоцветных фильтра. Особенно актуальны цветные фильтры для 10 и 12-битных систем. Так как обычные РС совместимые компьютеры не в состоянии воспроизводить на экране более 8 бит одного цвета, то для вывода большего количества градаций используются различные цветовые гаммы. Если Вы планируете работать в реальном времени, фильтры также должны иметь возможность работы в реальном времени.
Работа с гистограммой
Система должна уметь показывать изображение гистограммы, как по всему кадру, так и яркость по выделенной линии на изображении. Необходимо иметь возможность изменять форму гистограммы. Хорошие системы умеют показывать гистограмму в реальном времени со скоростью движущегося изображения. При рисовании гистограммы яркости по линии должна быть предусмотрена возможность измерения расстояний прямо на гистограмме, что позволяет довольно точно измерить размер дефекта. Также желательно, чтобы система поддерживала таблицу конверсии цифровой плотности, позволяющую задавать нелинейное изменение гистограммы до ее оцифровки. Такая таблица обязательно должна присутствовать в 8-битной системе, так как позволяет частично избавиться от недостатков 8-битной системы методом растяжения гистограммы на уровне аналогового сигнала.
Измерение расстояний
Система должна позволять измерение расстояния между двумя любыми точками, причем как непосредственно на экране, так и по гистограмме яркости по линии. Желательно также, чтобы была возможность увеличить изображение с помощью лупы и проводить измерение на увеличенном изображении.
Наличие базы данных
Очень многие системы не имеют базы данных (или она продается отдельно), и единственная возможность - это записать изображение в графический файл на диск. Это, возможно, приемлемо для исследовательской лаборатории, но совершенно недопустимо в условиях завода, где в смену могут идти сотни или тысячи изображений. База данных должна иметь возмож ность хранить изображения с подробным описанием каждого из них, а также быстро найти нужное изображение среди всей базы данных, в том числе сохраненной на магнитооптических и DVD дисках. Обязательно должно быть предусмотрено автоматическое резервное копирование базы данных и устойчивость базы данных к сбоям, так как потерять в случае сбоя компьютера базу данных за день работы равносильно тому, что вернуть все изделия на повторный контроль. Также поинтересуйтесь у фирмы-продавца, берется ли она доработать интерфейс базы данных конкретно под Ваши требования.
Обработка аварийных ситуаций
Желательно, чтобы система улучшения изображения имела связь с высоковольтным генератором для мгновенного выключения высокого напряжения при чрезмерной засветке экрана рентгенооптического преобразователя. Это продлит срок эксплуатации Вашей системы.
Управление внешними устройствами
Желательно наличие в системе аппаратного и программного интерфейса для управления различными внешними устройствами типа коллимирующей диафрагмы или рентгенозащитных шторок, которые предохраняют РЭОП от чрезмерной засветки. В самых развитых системах предусмотрена возможность управления различными манипуляторами.
Март 2007
Крамер Б.Ю.
Примечание автора.
Исходный текст статьи взят из журнала «В мире НК» N4 декабрь 2000 года и немного подредактирован в соответствии с сегодняшним уровнем развития рентгенотелевизионных систем. Несмотря на редактирование, данная статья, конечно, является немного устаревшей и не в полной мере отражает современные тенденции. Однако общие принципы, изложенные в статье, остаются неизменными, так как базируются на общих законах физики.










